Note
Go to the end to download the full example code.
Torso#
Repair the torso mesh where it was extracted and subtle holes along complex parts of the mesh
# sphinx_gallery_thumbnail_number = 2
import pyvista as pv
from pyvista import examples
import pymeshfix as mf
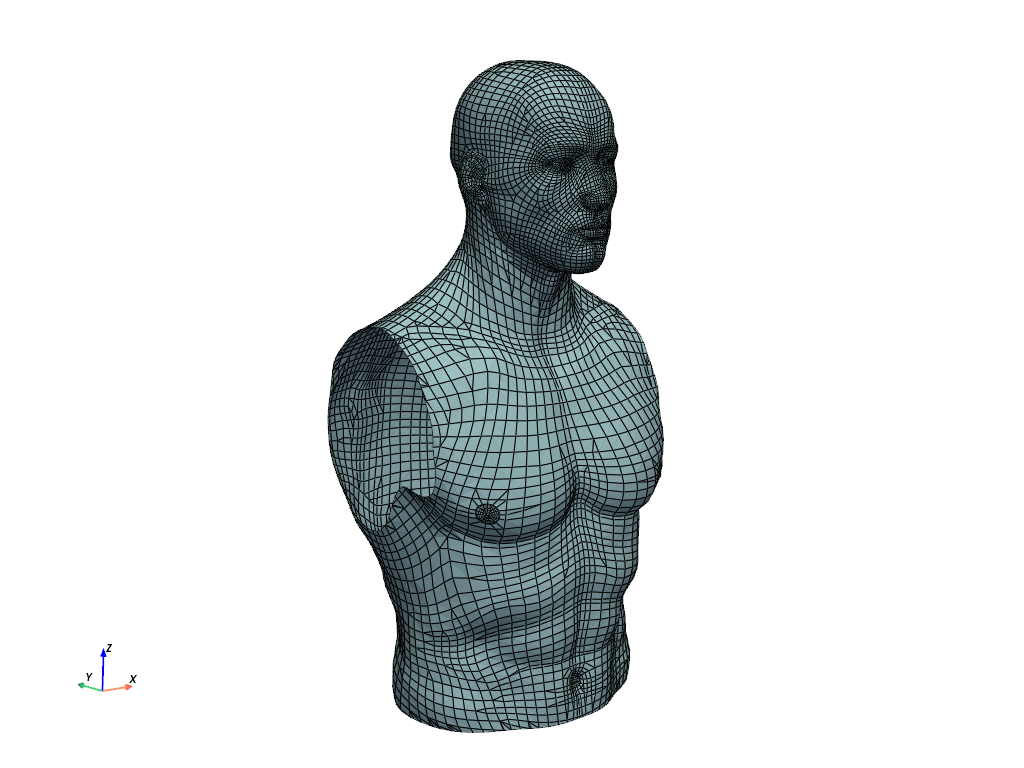
mesh = examples.download_torso()
print(mesh)
PolyData (0x7fe5add576a0)
N Cells: 12448
N Points: 12015
N Strips: 0
X Bounds: -1.680e+02, 1.720e+02
Y Bounds: -1.624e+02, 1.320e+02
Z Bounds: -6.442e+02, 9.083e+01
N Arrays: 0
cpos = [(-1053.0, -1251.0, 83.0), (2.0, -15.0, -276.0), (0.12, 0.18, 1)]
mesh.plot(color=True, show_edges=True, cpos=cpos)
Apply a triangle filter to ensure the mesh contains only triangles.
meshfix = mf.MeshFix(mesh.triangulate(), verbose=True)
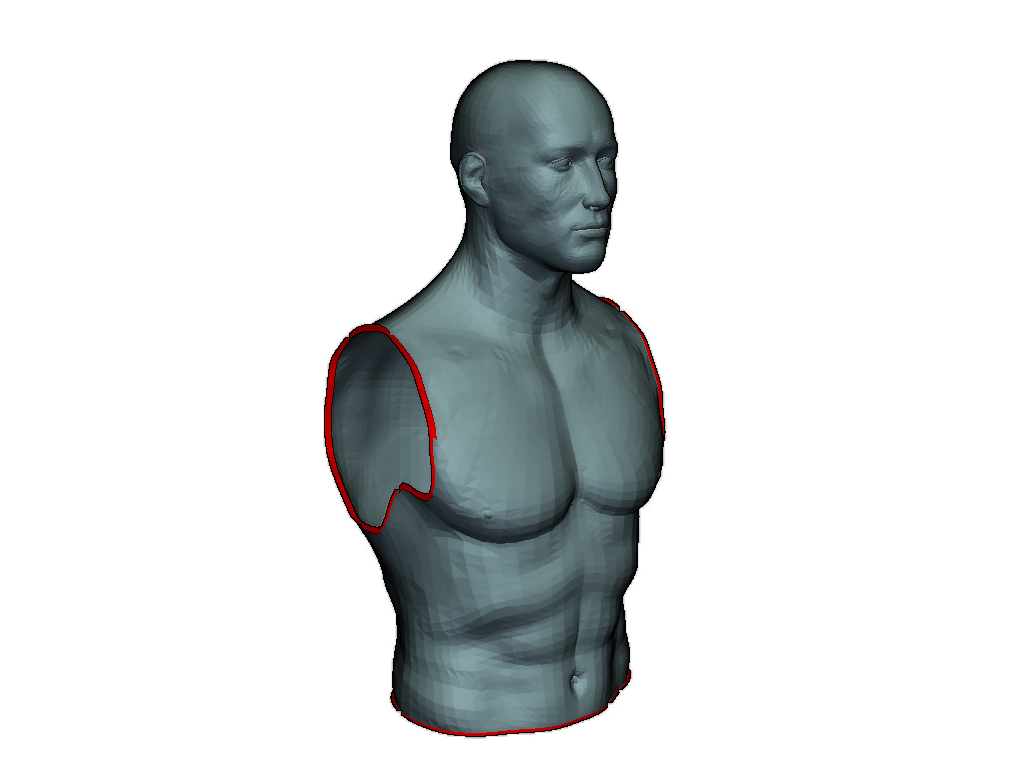
holes = meshfix.extract_holes()
Outline the holes in the mesh
p = pv.Plotter()
p.add_mesh(mesh)
p.add_mesh(holes, color="r", line_width=8)
p.enable_eye_dome_lighting() # helps with depth perception
p.camera_position = cpos
p.show()
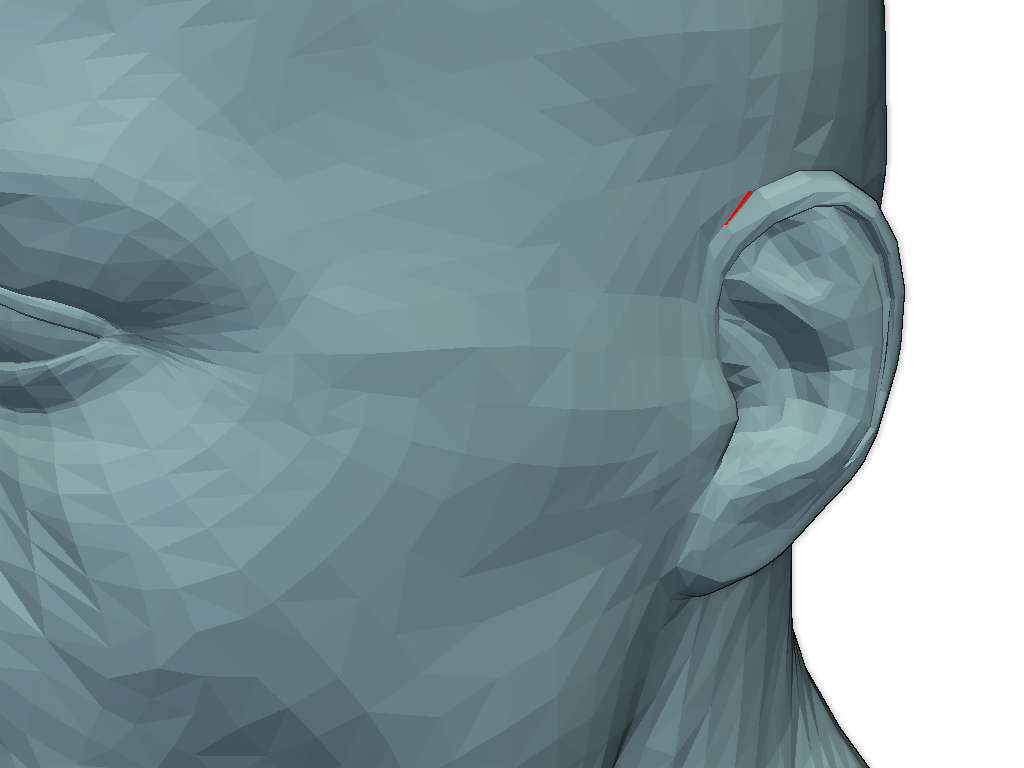
Emphasize the hole near the ear - this needs to be repaired so that the mesh is absolutely water tight.
cpos_ear = [(180.0, -206.0, 17.0), (107.0, -122.9, -11.9), (-0.13, 0.22, 0.96)]
p = pv.Plotter()
p.add_mesh(mesh)
p.add_mesh(holes, color="r", line_width=8)
p.enable_eye_dome_lighting() # helps with depth perception
p.camera_position = cpos_ear
p.show()
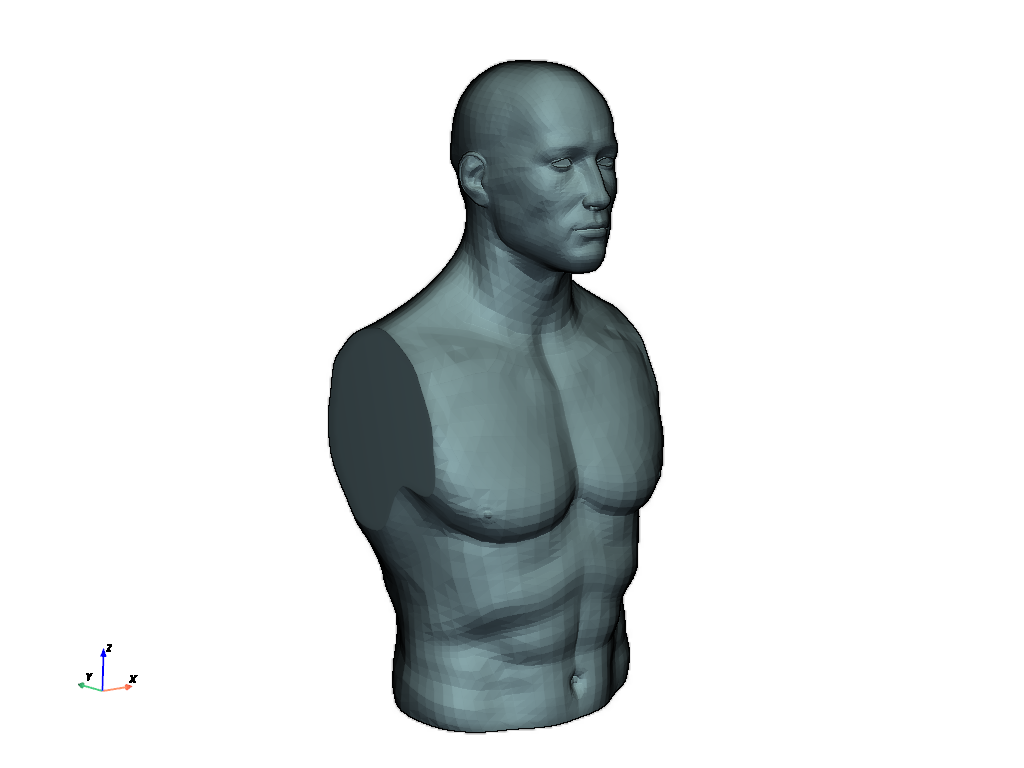
Perform the mesh repair
meshfix.repair()
Show the repaired mesh
meshfix.mesh.plot(cpos=cpos, show_edges=True)
Total running time of the script: (0 minutes 1.890 seconds)